Comparative Study of PID, SMC, DQN, and DDPG based control UAV-AGV collaboration
Hardware implementation of PID, SMC, DQN, DDPG based control for UAV-AGV collaboration. 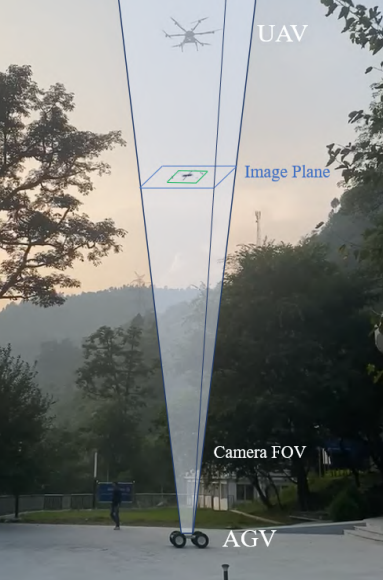

Hardware implementation of PID, SMC, DQN, DDPG based control for UAV-AGV collaboration.
Hardware implementation of Vision-Based Control of UAV for Autonomous Firefighting. 
Published in International Conference on Robotics and Automation Sciences 2024, Tokyo, Japan, 2024
This paper presents the autonomous vision-based control of an aerial manipulator for tracking horizontal pipe structures along with maintaining continuous contact with the pipe. We have designed a perception module that consists of custom made CNN with classical vision technique for pipe identification along with feature and Kalman filter for increasing data frequency. The sensor fusion of the camera and LIDAR is used to extract the cartesian coordinate of an approximate contact point. The new manipulator has been fabricated along with the development of its feed-forward position control. The image feature-based tracking control of the aerial platform is developed with a sliding mode controller. The autonomous operation strategy to organize the sub-tasks is developed and experimentally validated.
Published in International Conference on Computer and Automation Engineering 2024, Melbourne, Australia, 2024
This work develops a method for the vision-based localization and control of a UAV in firefighting situations. Detection of fire is done using a deep learning technique Precise 3-D cartesian coordinates of the centroid of fire is obtained using onboard sensors, contributing to the localization of fire. A PID based control strategy is developed for continuous tracking of fire and also maintaining a particular distance from the fire for ensuring accurate spraying. Additionally, the performance of the spraying subassembly has been independently verified.
Recommended citation: A. Mehra, A. Shukla, D. Prajapati, P. Kumar, A. Rana and T. Patil, "Vision-Based Control of UAV for Autonomous Firefighting," 2024 16th International Conference on Computer and Automation Engineering (ICCAE), Melbourne, Australia, 2024, pp. 562-566, doi: 10.1109/ICCAE59995.2024.10569529. keywords: {Location awareness;Deep learning;Automation;Accuracy;Spraying;Autonomous aerial vehicles;Feature extraction;Fire detection;Vision-based control algorithm;Unmanned Aerial Vehicle(UAV);Robotics and Automation;Autonomous firefighting},
Download Paper | Download Slides
Published in American Control Conference 2025, Denver, USA, 2025
In this paper, we have explored various control strategies for an AGV and UAV collaborative system. Our work focuses on developing a vision-based localization and control method for the AGV. We introduced four distinct control strategies: PID control, SMC, DQN based control, and DDPG based control, aimed at achieving continuous tracking of the UAV. We conducted a comprehensive comparison of these controllers across multiple parameters, highlighting their respective advantages and limitations. Everything was experimentally validated.
Published:
This is a description of your talk, which is a markdown files that can be all markdown-ified like any other post. Yay markdown!
Published:
This is a description of your conference proceedings talk, note the different field in type. You can put anything in this field.
Undergraduate course, University 1, Department, 2014
This is a description of a teaching experience. You can use markdown like any other post.
Workshop, University 1, Department, 2015
This is a description of a teaching experience. You can use markdown like any other post.